[Lc]133克隆图
Contents
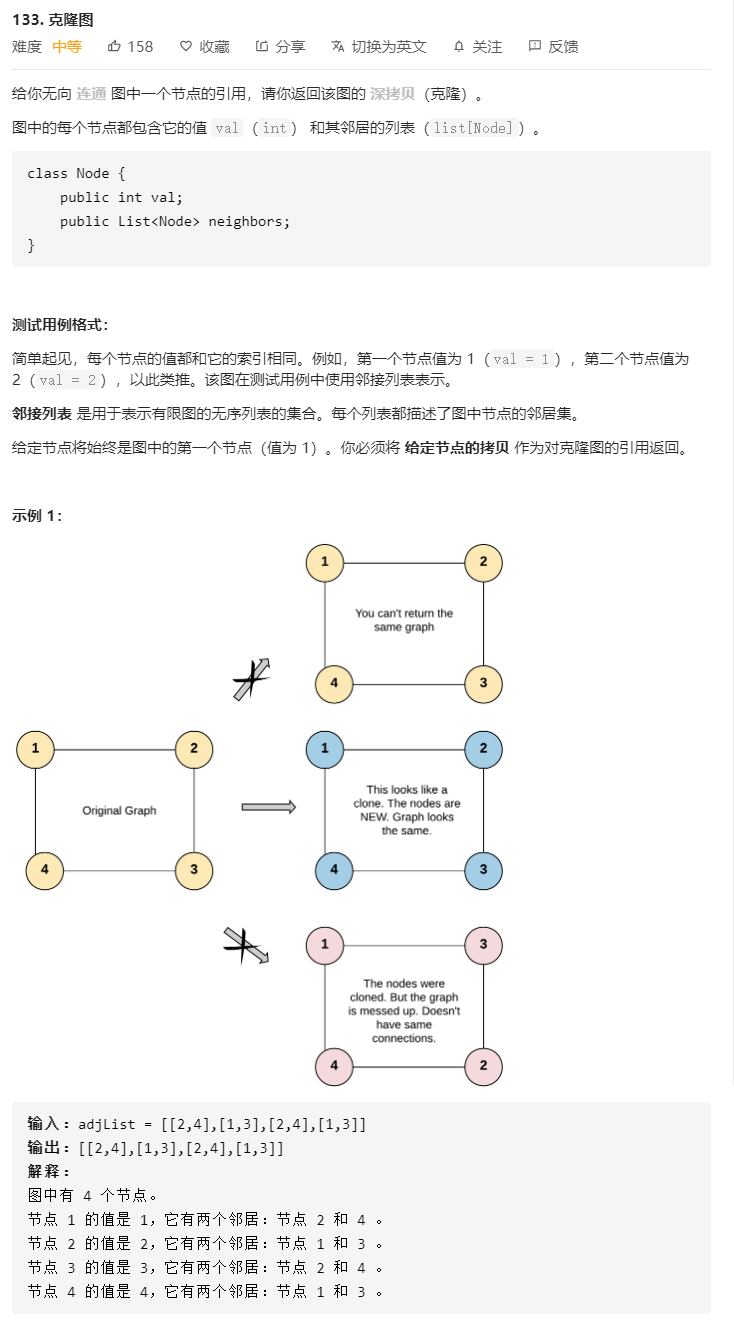
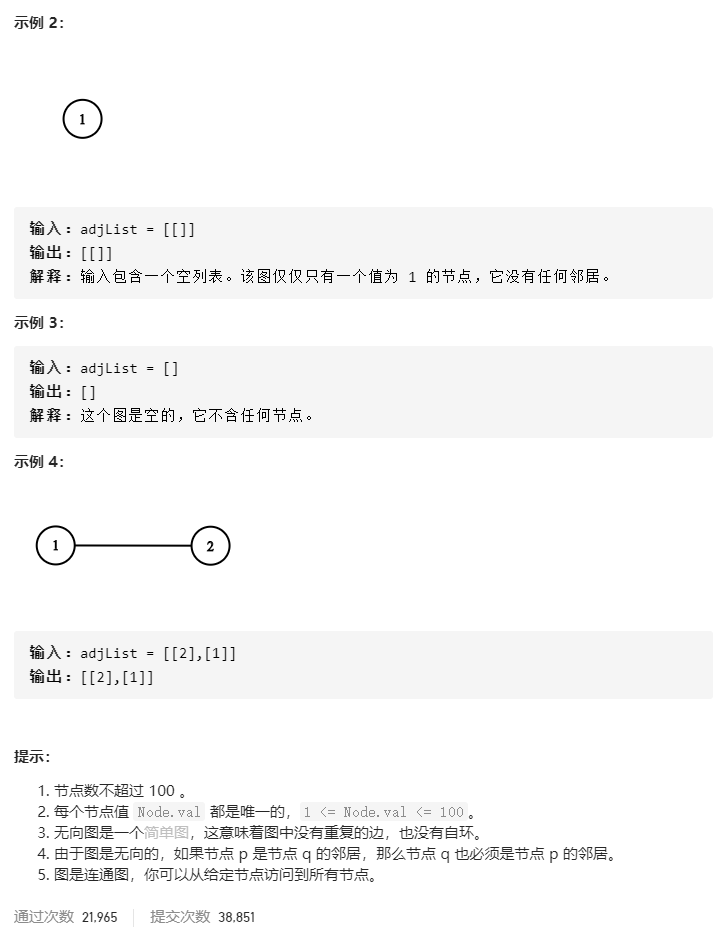
题目
图的定义如下:
// Definition for a Node.
class Node {
public:
int val;
vector<Node*> neighbors;
Node() {
val = 0;
neighbors = vector<Node*>();
}
Node(int _val) {
val = _val;
neighbors = vector<Node*>();
}
Node(int _val, vector<Node*> _neighbors) {
val = _val;
neighbors = _neighbors;
}
};
题解
两个方法。DFS,BFS
1. DFS
- 时间复杂度$O(N)$
- 空间复杂度$O(N)$
用一个unorder_map联系新旧两个图。从当前节点开始挨个复制,如果当前节点已经复制过则直接从map里面取
class Solution {//两个方法。1.DFS
//hash_map用于联系新旧两个图
unordered_map<Node*, Node*> old_new;
public:
Node* cloneGraph(Node* node) {
return dfs(node);
}
Node* dfs(Node* a){
if(!a) return nullptr;
if(old_new.count(a)) return old_new[a];
auto b = new Node(a->val);//复制当前节点
old_new[a] = b;//将该节点的新旧节点均复制到map中
//挨个dfs当前节点的每一个邻居节点
for(auto n : a->neighbors){
b->neighbors.emplace_back(dfs(n));
}
return b;
}
};
2. BFS
- 时间复杂度$O(N)$
- 空间复杂度$O(N)$
和DFS类似,只是多了一个队列q用于遍历当前节点的所有邻节点
class Solution {//两个方法。2. BFS
public:
Node* cloneGraph(Node* node) {
if(!node) return nullptr;
unordered_map<Node*, Node*> old_new;//定义关联新旧图各节点的map
auto new_node = new Node(node->val);//先复制第一个节点
old_new[node] = new_node;//关联第一个节点
queue<Node*> q;
q.push(node);//定义队列并压入第一个节点,用于BFS
while(!q.empty()){
auto tmp = q.front(); q.pop();//先取第一个节点
//挨个处理当前节点的每一个邻节点
for(auto n : tmp->neighbors){
//若这个邻节点还没有加入map,则加入,并加入队列q
if(!old_new.count(n)){
old_new[n] = new Node(n->val);
q.push(n);
}
//若已经加入map。直接添加到当前处理的节点的邻节点中
//加入map说明已经遍历过其所有的邻节点,不用加入队列q中
//若没加入map。上一步将其加入了,再进行这一步的处理
old_new[tmp]->neighbors.emplace_back(old_new[n]);
}
}
return new_node;
}
};
Author ChrisHRZ
LastMod 2020-06-23